![]()
ライダー装置の設計・開発・製作・販売・輸出・保守・修理
関連製品
PZT ドライバー Piezomechanik GmbH


アナログ アンプ SVR150/x

◉ 超精密な位置決めが可能
◉ セミバイポーラ方式による広い電圧範囲:-30 V / +150 V
◉ 電流出力:最大60mA
◉ 超低ノイズ
⦿ 最大セミバイポーラ範囲
-30V/+150V 最大限のストローク/フォース生成のために
⦿ 超低ノイズ
⦿ DCオフセットの手動設定
⦿ 入力信号に合わせて減衰量を調整可能
SVR150/1 シングルチャンネル (写真右)
SVR150 / 3 独立3 チャンネル
入力:
シグナル: +/-5 V (+/-10 V 減衰あり)
インピーダンス: 5 kΩ
コネクター: BNC
出力
コネクター: BNC
電圧: -30V~+150V
DC-オフセット範囲: -30V~+150V
ゲイン: 30 (減衰なし)
最大電流: 60 mA
ノイズ: 0.3 mVpp (4.7 µFarad 負荷の場合)
ディスプレイ: LCD
寸法 W x D x H (mm):
1ch: 165 x 200 x 65
3ch: 260 x 320 x 155
重量
1ch: 1.75 kg
3ch: 4.7 kg
以下の機種も可能です。
SVR180/x
出力 - 50 V/+180 V
最大電流 50 mA
アナログ ハイパワー アンプ LE 150/1

電圧範囲
0 V/+150 V
70kHzまでの広帯域(容量性負荷に依存)
低ノイズ
DCオフセットのマニュアル設定
入力信号のマッチングのための可変減衰量 シングルチャネル デバイス
入力
シグナル: +/-5 V(減衰時は+/-10 V)
インピーダンス: 5 kΩ
コネクター: BNC
出力
コネクター: BNC
電圧: 0 V ~ +150 V
DC-オフセット範囲: 0 V ~ +150 V
ゲイン: 30 (減衰なし)
ピーク電流: 1200 mA
平均電流: 350 mA
ノイズ: 20 mVpp (4.7 µFarad 負荷の場合)
LCD: ディスプレイ
寸法 W x D x H (mm): 260×320×165
重量: 6.8kg
以下も可能です。
出力: 0 V/+180 V
最大電流: 800 mA
ストレインゲージ・アンプ DMS.X
精密なストレインゲージの操作用 ピエゾを使った精密な位置決め作業のためのフィードバック・クローズドループ・ポジションコントロールなど

写真左 DMS 03 写真右 DMS01
DMS01
シングルチャンネル アンプ
幅×奥行き×高さ(mm) 120×120×60 重量 350g
(電源含む)
DMS03
トリプルチャンネル アンプ
幅×奥行き×高さ(mm) 240×120×60 重量 550g
(電源含む)
アクセサリー
◉ DMS信号入力ソケットに適合するLEMOコネクター0S304
◉ 4線式ケーブル、シールド付き
片側LEMO 0S304コネクター、片側ブラント付き
長さ1.5m(その他の長さは要相談)
◉ 4線式延長シールドケーブル、LEMO 0S304コネクター/カプラー付き 長さ2m、3m、4m
ひずみと位置の検出
◉ アナログ信号出力:
0V/+5V相当 ピエゾアクチュエーターの最大ひずみ
インピーダンス:1kOhms
コネクター: BNC
◉ 表示部
3 1/2桁LCディスプレイ
アンプの調整はミニポテンショメータで行う。
◉ ゼロ設定
ピエゾスタックの絶対長は,実装時の予圧条件や温度条件などによって変化します。
そのため,ピエゾアクチュエータの動作のためにゼロ点設定を行うことで,アクチュエータの取り付け時の機械的なオフセットを
すべて補正することができます。
◉ 可変ゲイン
ストレインゲージ・アレンジメントのオリジナル信号の高さは、主にストレインゲージの特性(k-ファクタ)とアクティブ・ブリッジ・エレメントの数(フルブリッジ、ハーフブリッジ、2/4ブリッジなど)に依存します。
DMSアンプには、可変ゲイン調整機能があり、定義されたピエゾのストローク/ひずみに対して、DMSの出力を0V/+5Vの範囲に正確に適合させることができます。
◉ 位置読み取り用ディスプレイの校正 単位:μm
サブマイクロメートルの分解能で安定した、またはゆっくりと変化する位置を、大型の液晶ディスプレイにμmの単位で表示します。
簡単な校正手順で、ピエゾアクチュエーターやセンサーの構成に合わせて読み取ることができます。
電源
12V
.jpg)
4つのアクティブエレメントを持つホイートストンブリッジの概略配置
コンタクト:
コネクター LEMO 0S 304 ピン番号または
撚り線/絶縁体の色(ブラントエンドの場合
Supply voltage in ブリッジ対角線1-2/赤-黒
Signal out ブリッジ対角線3-4/白-緑
ストレインゲージによる位置検出
◉ ストレインゲージ回路は、mVやμVレンジの非常に小さな信号を生成します。この信号を、標準的なアナログ出力電圧レベル(例:5V)やその他の有用な情報に変換するには、DMSデバイスのような高品質のアンプが必要です。
◉ 抵抗値350Ωから5kΩまでの各種ストレインゲージ DMSアンプは,350Ωから5kΩまでの抵抗値を持つすべてのストレインゲージに対応しています。
◉ DMSアンプは,ひずみゲージの電源部と信号検出部からなる完全な検出ユニットです。ひずみゲージの測定には他の属性は必要ありません。
◉ DMS 01 および 03 アンプは,ひずみ変動 < 10-6 までの高分解能を実現しています。
◉ 30kHzの帯域幅で高いダイナミクスを実現しています。
◉ DMSアンプはスタンドアローン型です。これにより、他の圧電素子とは別に、アンプをひずみゲージの近くに配置することができます。これにより、ゲージからアンプまでの距離が長いことによる電気的なノイズのピックアップが大幅に減少します。
► したがって、DMSのストレインゲージアンプは、高解像度、高ダイナミックな位置監視のためのピエゾアクチュエータ搭載ストレインゲージとの組み合わせに非常に適しています。
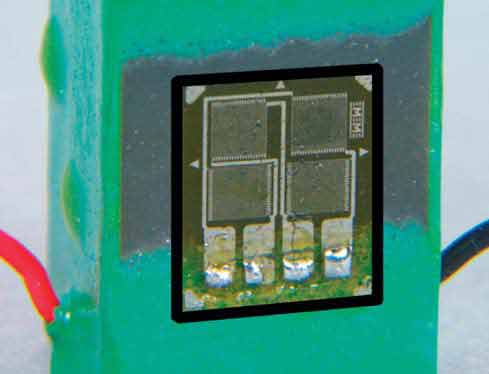

写真左
ピエゾスタック上の4つのアクティブエレメントのストレインゲージブリッジ構成
典型的なゲージの抵抗値:1.2キロオーム。
写真右
基本的な位置制御装置。ピエゾアクチュエーターにストレインゲージ式ポジションセンサーを装備。DMS01で位置を読み取る。
ピエゾアクチュエーター用電源SVR150(左)。
フィードバック コントローラ PosiCon 150/X
Feedback controllers PosiCon 150/X
写真 3チャンネルPosiCon 150/3
Posiconコントローラには、1 ch. PosiCon 150/1、 3 ch. PosiCon 150/3があります。
ピエゾポジショニングシステム「PosiCon」は、ピエゾアクチュエーターのクローズドループ制御に必要な電子サブシステムをすべて備えたコンプリートシステムです。
⦿ 位置センサー信号増幅器ステージ
⦿ フィードバック制御ロジック
⦿ ピエゾ電圧増幅器
⦿ ピエゾ電圧増幅器:-30V/+150V
ピエゾアクチュエータは、PosiConデバイスの電圧範囲に対応し、オプションの "ポジションセンサー "を表示する必要があります(アクチュエータのデータシートを参照)。
精度と応答時間の点で、幅広い位置決めアプリケーションに対応しています。また、アンプステージはセミバイポーラ方式を採用しているため、大きなストロークでもノイズが少なく、位置決めシステムのスムーズな反応を実現します。
デュアルユース。
PosiConデバイスは、「クローズドループ」または「オープンループ」モードで動作させることができます。
モードの選択は、フロントパネルにあるスイッチで簡単に行うことができます。
マルチチャンネルデバイスでは、各チャンネルを個別に設定できます。オープンループ "モードでは、PosiConはシンプルなピエゾアンプとして動作します。
位置情報は "オープンループ "モードでも提供されます("表示 "と "モニター "参照)。
フィードバック制御されたPosiConシステムの利点とは?

表面実装型ひずみゲージを用いた圧電部品
ピエゾアクチュエーターのストロークは,ケーシング内のピエゾスタックに直接取り付けられた位置センサー(ストレインゲージ)によって測定されます。
これにより、センサはスタックのひずみ状態に影響を与える内部および外部のあらゆる影響を検出します。
その結果、以下のようになります。
入力された基準信号に従ったアクチュエータの高度に直線的で再現性のある動き(ピエゾ材料のクリープ,ヒステリシス,非直線性の排除)。
ピエゾスタックの歪みを変化させる可能性のある荷重変動に対して、自動的に自己補償を行う:PosiConシステムは実質的に無限の剛性を示す(荷重が変化しても歪みが変化しない)。
PosiConシステムは実質的に無限の剛性を持っています(力が変化してもひずみが変化しません) ●アクチュエータの潜在的な熱膨張をも補正する、特殊な熱補償ストレインゲージを使用しています。
機能要素、操作
"オープン/クローズドループ" 選択スイッチ "フィードバック"
PosiConの各チャンネルは、スイッチで "オープンループ "と "クローズドループ "を選択することができます。オープンループ "モードでは、PosiConは通常のピエゾアンプのように動作します。
位置検出は引き続き行われますので、位置情報は "LC-Display "と "Monitor "で提供されます。
"オフセット"
クローズドループ動作:
位置の手動設定が可能です。位置は "Offset "で直線的に変化し、ヒステリシスやクリープはありません。
負荷の変化による位置の変動は自動的に補正されます。
オフセット」の設定は、外部信号に重畳されます。
オープンループ動作:
出力ピエゾ電圧の手動設定が可能です。
操作部の位置は "オフセット "によって変化し、ヒステリシスとクリープを伴う通常のオープンループ動作となります。
オフセット」の設定は、外部信号に重畳されます。
LC-ディスプレイ
チャンネル毎に "μm "と "Volt "の表示が可能
ゼロ設定:
ピエゾアクチュエータの動作開始点は、取り付け力や予圧などの様々な条件に左右されます。
適正な位置を読み取るために、PosiConの各チャンネルは、フロントパネルのポテンショメーターによって個別に「ゼロ」に設定することができます。
ゲインファクター:
PosiConの各チャンネルのアンプのゲインファクタは、スイッチで個別に設定でき、フルストローク動作のために5Vまたは10Vの入力信号を交互に受け入れることができます。
"モニター"
フロントパネルとリアパネルのBNCコネクタを介して,各チャネルの位置とピエゾ電圧のリアルタイム情報としてアナログ信号を提供します。
ピエゾ電圧は1:1000の割合で減少します。位置はフルストロークに相当する5Vの振れ幅で表されます。
センサー入力:
PosiConユニットの入力には、4つのアクティブ要素を持つホイートストンブリッジからの信号が必要です。
このセンサー素子は、通常、ピエゾアクチュエータに取り付けられています(オプション:位置検出)。
しかし、このセンサーは、外部のメカニズムに取り付けることもできます。
電気コネクタは4極のLEMO 0S.304です。
ピエゾ電圧出力:
BNC
オプションで、LEMO 00 250などの他の接続システムも利用可能です。
出力電圧:
PosiCon 150:-30V~+150V/
最大電流:60mA
キャリブレーション:
校正は、PosiConの位置表示("μm"-LCDおよび "Monitor")をアクチュエータの性能に合わせるためにのみ必要です。
校正はPIEZOMECHANIKの工場で行われ、アクチュエータとPosiConの組み合わせごとに有効です。
校正されていないシステムは、"閉ループ "フィードバックモードでも動作しますが(ヒステリシス、クリープなどの補正)、位置の読み出しだけは有効ではありません。
リピータビリティ、感度
精度とは、同等の入力信号を入力したときに、目的の位置に到達するための許容範囲を意味します。
A、ランダムアクセスで位置を指定する場合はPosiConシステムでは、約±0.1%の繰り返しの許容範囲を示すことができます。
50mmのアクチュエーターは、±50ナノメートルの許容範囲内で動作します。
+/- 50ナノメートルの公差領域(残留ヒステリシス)で動作します。
B, 周期的な動きのプロファイルでは、再現性はさらに良くなります。
C, クローズドループモードでは、位置の相対的な変化を解決できる最小値は約5nmです。
ピエゾアクチュエーターによる精密位置決め
ピエゾアクチュエーターは、小さな電圧で無限に小さな動きをすることができるという特徴があり、超精密な位置決めが可能です。
一方で、ピエゾアクチュエーターに大きな電圧信号の変化を与えると、実際の位置のステップ幅に影響を与えることがあります。一方、ピエゾアクチュエータに電圧信号を大きく変化させた場合、実際の位置ステップ幅は、アクチュエータに作用する多くの内部および外部パラメータに影響されるため、最初の瞬間には、電圧と誘導運動の関係は大まかにしか予測することができません。このことは、ピエゾアクチュエーターに一連のランダムな電圧ステップを適用したり、よく知られているヒステリシスループを生成する明確な電圧範囲でサイクルを実行することによって、簡単に実証することができます。
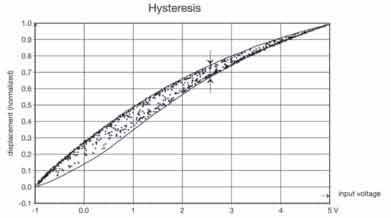
ランダムな電圧ステップのシーケンスに対するピエゾアクチュエーターの位置と駆動電圧のオープンループ相関。ランダムに生成された点の列が、ヒステリシスサイクルに囲まれた領域を埋めている。
さらに、フルスケールの電圧を連続的に変化させた場合の通常のヒステリシス・サイクルも示されている。
実際の位置に関するこの情報を得るために、アクチュエータは適切な種類の位置検出効果またはセンサーと組み合わされます。「適切」とは、精度、再現性、直線性が十分に高いことを意味します。
フィードバック制御により、アクチュエータの実際の位置は、入力信号の大きさによって定義される希望の位置と常に比較されます。欲しい位置(基準位置)と実位置の間に差がある場合、フィードバック制御はその差を直ちに打ち消し(アクチュエータ-センサーの閉ループ動作)、システムは完全な位置に落ち着きます。
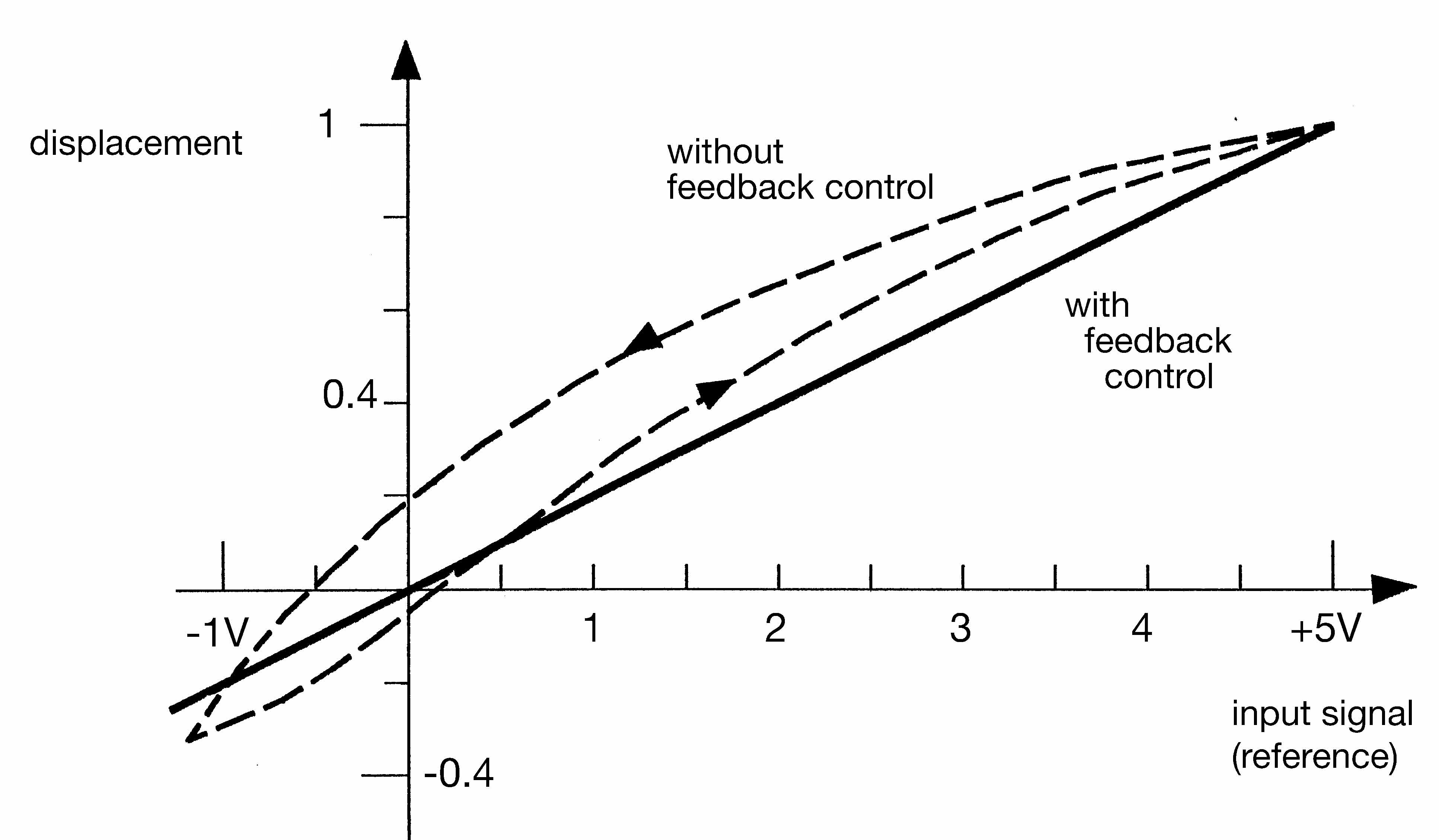
ストロークとピエゾメカニカルシステムへの基準入力電圧の関係
A オープンループ動作(標準アンプまたはPosiCon Aの "フィードバック・オフ "モードによる)。
結果:典型的なピエゾアクチュエーターの非線形ヒステリシスの
A特性 ヒステリシス約15
B PosiConシステムの閉ループ動作
ポジコンシステムの閉ループ動作。
結果:残留ヒステリシスのある線形特性。
アクチュエータの最大ストロークの0.1%の大きさのBオーダー